- Сила сухого трения покоя
- Сила сухого трения скольжения
- Сила сопротивления среды
- знать понятия сила сухого трения покоя, сила сухого трения скольжения; формулу силы сухого трения скольжения
- уметь определять направление сил трения; объяснять природу сил сопротивления воздуха
- Какие силы действуют на тело, покоящееся на горизонтальной поверхности?
- Какие силы действуют на тело, покоящееся на наклонной поверхности?
- Какие силы возникают в жидкостях и газах при движении в них твёрдого тела?
Сила сухого трения покоя
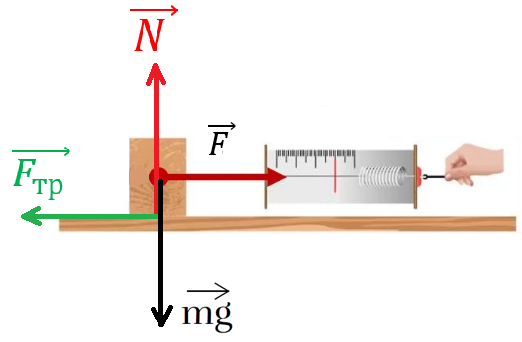 Рис. 1. Силы, действующие на брусок массой m
Рис. 1. Силы, действующие на брусок массой m
Пусть на горизонтальной поверхности стола покоится деревянный брусок массой m. Приложим к бруску силу так, как показано на рисунке 1. Установлено, что брусок будет оставаться в покое относительно стола до тех пор, пока значение силы не окажется равным некоторому значению . Следовательно, поверхность стола действует на брусок с некоторой силой, препятствующей его движению. Данная сила получила название сила сухого трения покоя. Сила сухого трения покоя уравновешивает действие силы . Пока брусок остаётся в покое, ускорение тела равно нулю, следовательно, сила сухого трения покоя равна по модулю и противоположна по направлению силе тяги: .
Сила реакции опоры, действующая на брусок со стороны стола, численно равна силе тяжести .
При достижении силой некоторого значения брусок начнёт движение относительно стола. Полученное значение силы называется максимальным модулем силы сухого трения покоя.
Опытным путём установлено, что при изменении положения бруска относительно поверхности стола значение не изменится. Таким образом, модуль максимальной силы трения покоя не зависит от площади соприкосновения тел.
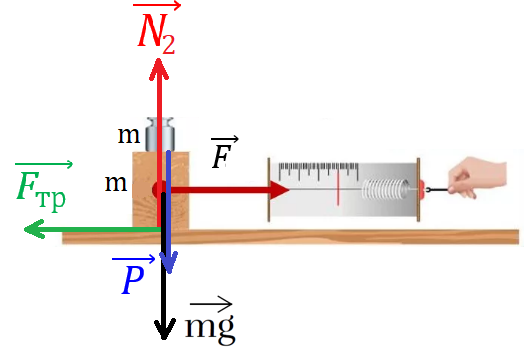 Рис. 2. Силы, действующие на брусок массой m при добавлении груза
Рис. 2. Силы, действующие на брусок массой m при добавлении груза
Поставим на деревянный брусок гирьку той же массы m, что и сам брусок (рис. 2). Тогда на брусок начнёт действовать вес гири , численно равный . В результате действия этой силы сила реакции опоры увеличится в два раза: . В этом случае модуль максимальной силы сухого трения покоя тоже увеличится в два раза.
Экспериментально установлено, что при увеличении модуля силы реакции опоры в раз модуль максимальной силы сухого трения покоя также увеличится в раз.
Модуль максимальной силы сухого трения покоя прямо пропорционален модулю силы реакции опоры: .
Отношение модуля максимальной силы сухого трения покоя к модулю силы реакции опоры называется коэффициентом трения .
Силы сухого трения имеют электромагнитную природу и обусловлены силами межмолекулярного взаимодействия двух трущихся поверхностей.
Коэффициент трения зависит от материалов соприкасающихся поверхностей и качества их обработки. Коэффициент трения для каждой пары поверхностей определяется экспериментально.
Обобщая результаты экспериментов, можно сказать, что модуль силы сухого трения покоя может изменяться от нуля до значения .
Сила сухого трения скольжения
Если модуль силы, приложенной к бруску, будет превышать значение , брусок начнёт скользить вдоль поверхности стола.
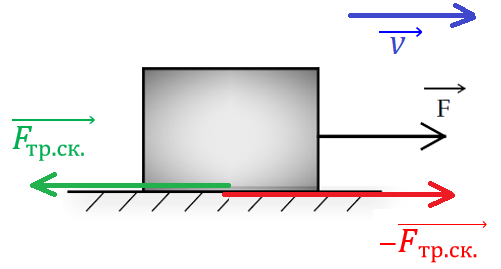 Рис. 3. Силы трения действуют на обе соприкасающиеся поверхности
Рис. 3. Силы трения действуют на обе соприкасающиеся поверхности
Если прекратить действовать на тело, брусок начнёт терять скорость и остановится. Для поддержания скорости движения бруска необходимо действовать на него с силой непрерывно. Таким образом, при движении тела вдоль поверхности, сила, препятствующая его движению, не прекращает своего действия. Она получила название сила сухого трения скольжения .
Силы трения скольжения оказывают действие на обе соприкасающиеся поверхности и всегда направлены в сторону, противоположную относительной скорости движения соответствующего тела (рис. 3).
 Рис. 4. Зависимость силы трения от скорости движения тела
Рис. 4. Зависимость силы трения от скорости движения тела
В ходе экспериментального изучения силы трения было выяснено, что модуль силы трения зависит не только от материалов соприкасающихся поверхностей, но и от относительной скорости их взаимного движения. При появлении скольжения с малой скоростью величина силы трения уменьшается. При больших скоростях относительного движения тел модуль силы трения начинает резко возрастать и может превысить значение (рис. 4).
При небольших скоростях модуль силы сухого трения скольжения приближённо равен модулю максимальной силы сухого трения покоя .
В большинстве задач динамики модуль силы сухого трения скольжения принимают равным .
Модуль силы сухого трения скольжения приближённо равен модулю максимальной силы сухого трения покоя : .
Значительно уменьшить силу сухого трения можно с помощью смазки. Смазка представляет собой слой жидкости или газа между движущимися относительно друг друга поверхностями.
При движении твёрдого тела в жидкости или газе возникают силы вязкого трения. Сила вязкого трения вызвана трением поверхности твёрдого тела об окружающую среду. Помимо силы вязкого трения, при движении твёрдого тела в жидкой или газообразной среде возникает сила лобового сопротивления — сила, возникающая из-за разности давлений перед движущимся телом и за ним. Сумма сил вязкого трения и лобового сопротивления называется силой сопротивления среды.
 Рис. 5. Зависимость силы сопротивления среды от скорости движения тела относительно среды
Рис. 5. Зависимость силы сопротивления среды от скорости движения тела относительно среды
Сила сопротивления среды резко возрастает с увеличением скорости движения тела (рис. 5). С другой стороны, при очень малых скоростях сила сопротивления среды также очень мала, по этой причине даже слабый ветер может привести в движение тяжёлые корабли.
При небольших скоростях движения тела относительно среды модуль силы сопротивления прямо пропорционален модулю скорости тела:
.
При больших скоростях движения тела относительно среды модуль силы сопротивления прямо пропорционален квадрату модуля скорости тела:
.
Коэффициенты и — коэффициенты пропорциональности, которые зависят от размеров, формы, материла поверхности тела, от вязкости и плотности среды. Коэффициенты и не равны друг другу.
Итоги
- Модуль максимальной силы сухого трения покоя прямо пропорционален модулю силы реакции опоры: .
- Отношение модуля максимальной силы сухого трения покоя к модулю силы реакции опоры называется коэффициентом трения .
- Модуль максимальной силы трения покоя не зависит от площади соприкосновения тел. Модуль силы сухого трения покоя может изменяться от нуля до значения .
- Модуль силы сухого трения скольжения приближённо равен модулю максимальной силы сухого трения покоя : .
- Сумма сил вязкого трения и лобового сопротивления называется силой сопротивления среды.
Контрольные вопросы
1. Как рассчитывается сила сухого трения скольжения?
2. Зависит ли модуль максимальной силы сухого трения покоя от площади соприкасающихся поверхностей?
3. Объясните природу сил сопротивления среды.
- Сила сухого трения покоя
- Сила сухого трения скольжения
- Сила сопротивления среды
- знать понятия сила сухого трения покоя, сила сухого трения скольжения; формулу силы сухого трения скольжения
- уметь определять направление сил трения; объяснять природу сил сопротивления воздуха
- Какие силы действуют на тело, покоящееся на горизонтальной поверхности?
- Какие силы действуют на тело, покоящееся на наклонной поверхности?
- Какие силы возникают в жидкостях и газах при движении в них твёрдого тела?
Сила сухого трения покоя
Рис. 1. Силы, действующие на брусок массой m
Пусть на горизонтальной поверхности стола покоится деревянный брусок массой m. Приложим к бруску силу так, как показано на рисунке 1. Установлено, что брусок будет оставаться в покое относительно стола до тех пор, пока значение силы не окажется равным некоторому значению . Следовательно, поверхность стола действует на брусок с некоторой силой, препятствующей его движению. Данная сила получила название сила сухого трения покоя. Сила сухого трения покоя уравновешивает действие силы . Пока брусок остаётся в покое, ускорение тела равно нулю, следовательно, сила сухого трения покоя равна по модулю и противоположна по направлению силе тяги: .
Сила реакции опоры, действующая на брусок со стороны стола, численно равна силе тяжести .
При достижении силой некоторого значения брусок начнёт движение относительно стола. Полученное значение силы называется максимальным модулем силы сухого трения покоя.
Опытным путём установлено, что при изменении положения бруска относительно поверхности стола значение не изменится. Таким образом, модуль максимальной силы трения покоя не зависит от площади соприкосновения тел.
Рис. 2. Силы, действующие на брусок массой m при добавлении груза
Поставим на деревянный брусок гирьку той же массы m, что и сам брусок (рис. 2). Тогда на брусок начнёт действовать вес гири , численно равный . В результате действия этой силы сила реакции опоры увеличится в два раза: . В этом случае модуль максимальной силы сухого трения покоя тоже увеличится в два раза.
Экспериментально установлено, что при увеличении модуля силы реакции опоры в раз модуль максимальной силы сухого трения покоя также увеличится в раз.
Модуль максимальной силы сухого трения покоя прямо пропорционален модулю силы реакции опоры: .
Отношение модуля максимальной силы сухого трения покоя к модулю силы реакции опоры называется коэффициентом трения .
Силы сухого трения имеют электромагнитную природу и обусловлены силами межмолекулярного взаимодействия двух трущихся поверхностей.
Коэффициент трения зависит от материалов соприкасающихся поверхностей и качества их обработки. Коэффициент трения для каждой пары поверхностей определяется экспериментально.
Обобщая результаты экспериментов, можно сказать, что модуль силы сухого трения покоя может изменяться от нуля до значения .
Сила сухого трения скольжения
Если модуль силы, приложенной к бруску, будет превышать значение , брусок начнёт скользить вдоль поверхности стола.
Рис. 3. Силы трения действуют на обе соприкасающиеся поверхности
Если прекратить действовать на тело, брусок начнёт терять скорость и остановится. Для поддержания скорости движения бруска необходимо действовать на него с силой непрерывно. Таким образом, при движении тела вдоль поверхности, сила, препятствующая его движению, не прекращает своего действия. Она получила название сила сухого трения скольжения .
Силы трения скольжения оказывают действие на обе соприкасающиеся поверхности и всегда направлены в сторону, противоположную относительной скорости движения соответствующего тела (рис. 3).
Рис. 4. Зависимость силы трения от скорости движения тела
В ходе экспериментального изучения силы трения было выяснено, что модуль силы трения зависит не только от материалов соприкасающихся поверхностей, но и от относительной скорости их взаимного движения. При появлении скольжения с малой скоростью величина силы трения уменьшается. При больших скоростях относительного движения тел модуль силы трения начинает резко возрастать и может превысить значение (рис. 4).
При небольших скоростях модуль силы сухого трения скольжения приближённо равен модулю максимальной силы сухого трения покоя .
В большинстве задач динамики модуль силы сухого трения скольжения принимают равным .
Модуль силы сухого трения скольжения приближённо равен модулю максимальной силы сухого трения покоя : .
Значительно уменьшить силу сухого трения можно с помощью смазки. Смазка представляет собой слой жидкости или газа между движущимися относительно друг друга поверхностями.
При движении твёрдого тела в жидкости или газе возникают силы вязкого трения. Сила вязкого трения вызвана трением поверхности твёрдого тела об окружающую среду. Помимо силы вязкого трения, при движении твёрдого тела в жидкой или газообразной среде возникает сила лобового сопротивления — сила, возникающая из-за разности давлений перед движущимся телом и за ним. Сумма сил вязкого трения и лобового сопротивления называется силой сопротивления среды.
Рис. 5. Зависимость силы сопротивления среды от скорости движения тела относительно среды
Сила сопротивления среды резко возрастает с увеличением скорости движения тела (рис. 5). С другой стороны, при очень малых скоростях сила сопротивления среды также очень мала, по этой причине даже слабый ветер может привести в движение тяжёлые корабли.
При небольших скоростях движения тела относительно среды модуль силы сопротивления прямо пропорционален модулю скорости тела:
.
При больших скоростях движения тела относительно среды модуль силы сопротивления прямо пропорционален квадрату модуля скорости тела:
.
Коэффициенты и — коэффициенты пропорциональности, которые зависят от размеров, формы, материла поверхности тела, от вязкости и плотности среды. Коэффициенты и не равны друг другу.
Итоги
- Модуль максимальной силы сухого трения покоя прямо пропорционален модулю силы реакции опоры: .
- Отношение модуля максимальной силы сухого трения покоя к модулю силы реакции опоры называется коэффициентом трения .
- Модуль максимальной силы трения покоя не зависит от площади соприкосновения тел. Модуль силы сухого трения покоя может изменяться от нуля до значения .
- Модуль силы сухого трения скольжения приближённо равен модулю максимальной силы сухого трения покоя : .
- Сумма сил вязкого трения и лобового сопротивления называется силой сопротивления среды.
Контрольные вопросы
1. Как рассчитывается сила сухого трения скольжения?
2. Зависит ли модуль максимальной силы сухого трения покоя от площади соприкасающихся поверхностей?
3. Объясните природу сил сопротивления среды.