- Движение по окружности
- Угловая скорость
- Период и частота движения по окружности
- Ускорение при равномерном движении по окружности
- знать понятие «движение по окружности»; физический смысл и формулы угловой скорости, центростремительного ускорения, периода и частоты движения по окружности
- уметь рассчитывать линейную скорость, центростремительное ускорение, период и частоту движения по окружности
- Что такое угловая скорость?
- Есть ли ускорение у тела, движущегося по окружности?
- Каков период обращения Земли вокруг Солнца?
Движение по окружности
При движении по окружности траектория движения тела представляет собой окружность постоянного радиуса. Так движется точка на ободе колеса, конец стрелки механических часов, гоночная машина на круговой трассе. Приближённо можно считать, что Земля вокруг Солнца и Луна вокруг Земли двигаются по окружностям.
Движение по окружности — это такое движение точечного тела, при котором его траектория в выбранной системе отсчёта имеет форму окружности.
Следует различать движение по окружности и вращательное движение: Земля движется по окружности вокруг Солнца, одновременно наша планета вращается вокруг своей оси, точка на поверхности Земли движется по окружности вокруг земной оси вращения и одновременно движется по окружности вокруг Солнца.
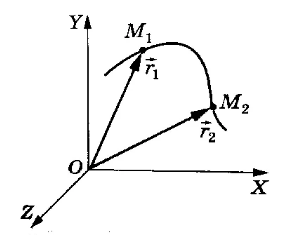 Рис. 1. Векторный способ задания положения тела в пространстве
Рис. 1. Векторный способ задания положения тела в пространстве
Ранее для описания положения тела в пространстве в любой момент времени мы использовали только координатный метод. Данный метод применим для описания движения тела по окружности, однако математическое выражение закона изменения координат точечного тела при его движении по окружности очень трудоёмко, поэтому мы применим другой способ — векторный. Векторный способ описания положения тела в пространстве предполагает использование радиус-вектора.
Радиус-вектор — это вектор, проведённый из начала координат системы отсчёта в точку пространства, где в данный момент находится рассматриваемое точечное тело.
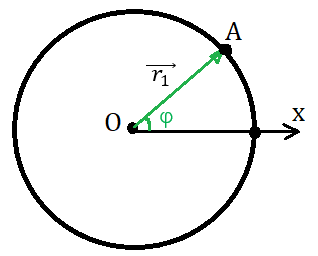 Рис. 2. Положение тела на окружности задаётся с помощью угла φ
Рис. 2. Положение тела на окружности задаётся с помощью угла φ
Рассмотрим рисунок 1: в начальный момент времени точечное тело находится в точке М1, его положение задаёт радиус-вектор . При движении тела из точки М1 в точку М2 радиус-вектор изменяется как по направлению, так и по модулю: положение тела в точке М2 задаёт радиус вектор .
При движении точечного тела по окружности за начало координат принимается центр окружности, радиус-вектор будет изменять только своё направление, так как его длина в процессе движения всё время будет равна радиусу окружности.
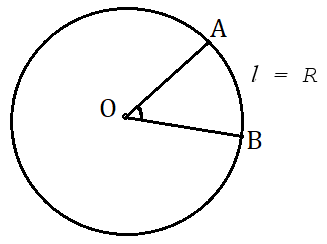 Рис. 3. Угол АОВ соответствует 1 радиану
Рис. 3. Угол АОВ соответствует 1 радиану
При движении точечного тела А по окружности будет изменяться угол — угол между радиус-вектором и осью ОХ (рис. 2). Таким образом, чтобы описать движение тела по окружности, необходимо определить зависимость угла от времени t.
Если известна зависимость (t), можно найти положение точечного тела в любой момент времени или, наоборот, найти момент времени, когда тело находится в заданной точке.
Угол φ может измеряться в градусах, но на практике часто применяется и другая единица измерения угла — радианы (рад). Если длина дуги АВ равна радиусу окружности R, то угол = 1 рад (рис. 3).
Один радиан — это величина центрального угла окружности, опирающегося на дугу, длина которой равна радиусу окружности.
.
Угловая скорость
Пусть закон движения точечного тела А, движущегося по окружности, имеет следующий вид:
.
Заметим, что при t = 0 угол между радиус-вектором и осью ОХ составляет , следовательно, величина задаёт начальное положение радиус-вектора.
Величина показывает, на какой угол поворачивается радиус-вектор за секунду.
Подставляя в выражение выше различные значения времени, найдём положения точечного тела А в соответствующие временные промежутки.
Отметим на окружности полученные положения точечного тела А (рис. 4).
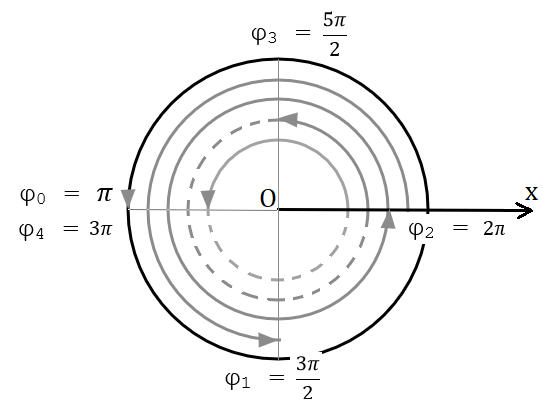 Рис. 4. Положение точечного тела в разные моменты времени
Рис. 4. Положение точечного тела в разные моменты времени
Начальный угол между радиус-вектором и осью ОХ обозначается . В рассматриваемой задаче . Величина показывает величину изменения угла в единицу времени. Физическая величина, характеризующая быстроту изменения угла , называется угловой скоростью (греческая буква «омега») и рассчитывается по следующей формуле:
.
где [рад] — угол поворота радиус-вектора точечного тела за время Δt,
Δt [с] — время.
Угловая скорость — это величина, равная отношению угла поворота радиус-вектора точечного тела, движущегося по окружности, за время Δt к этому промежутку времени: .
Единица измерения угловой скорости в СИ, как видно из формулы, — радиан в секунду (рад/с).
В приведённом примере угловая скорость равна
.
Если угловая скорость точечного тела, движущегося по окружности, не меняется с течением времени, такое движение является равномерным.
В общем виде зависимость имеет следующий вид:
,
где [рад] — угол между радиус-вектором и осью ОХ в момент времени t;
[рад] — начальный угол;
[рад/с] — угловая скорость;
t [с] — время.
Закон равномерного движения точечного тела по окружности: .
Если движение радиус-вектора осуществляется против часовой стрелки, то
> 0, в этом случае угловая скорость положительна > 0. В противном случае, если тело движется по часовой стрелке, то < 0, угловая скорость отрицательна < 0.
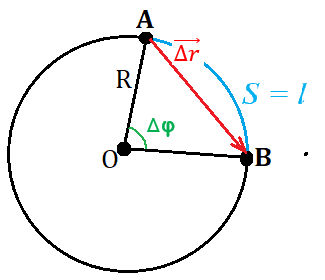 Рис. 5. Перемещение точечного тела из точки А в точку В
Рис. 5. Перемещение точечного тела из точки А в точку В
Для определения численного значения мгновенной скорости точечного тела, движущегося по окружности, в начале определим среднюю скорость такого тела .
За некоторый промежуток времени Δt тело проходит путь S от точки А до точки В вдоль окружности, равный длине дуги (рис. 5).
Если угол поворота задан в градусах, то длина дуги рассчитывается по следующей формуле:
.
Учтём, что рад. Тогда эта формула принимает следующий вид:
.
При движении по окружности тело поворачивается на угол . Средняя скорость — это отношение пройденного пути ко времени:
.
Если рассматриваемое тело движется с угловой скоростью , то угол поворота равен произведению угловой скорости на время:
.
C учётом соотношения выше среднюю скорость тела, движущегося по окружности, можно найти по следующей формуле:
.
Таким образом, средняя скорость тела, движущегося по окружности, равна произведению радиуса и угловой скорости тела.
Модуль мгновенной скорости тела — это отношение модуля перемещения к промежутку времени, за который оно произошло:
.
Модуль перемещения равен длине хорды, соединяющей начальную и конечную точки движения. При движении тела из точки А в точку В модуль перемещения равен длине хорды АВ. При уменьшении рассматриваемого промежутка времени Δt до достаточно малого значения длина дуги, соединяющей начальную и конечную точку , будет практически равна соответствующей хорде. Можно считать, что модуль перемещения равен пройденному пути .
Таким образом, если промежуток времени Δt достаточно мал, модуль мгновенной скорости равен
,
где [м/с] — мгновенная скорость тела, движущегося по окружности;
R [м] — радиус окружности;
[рад/с] — угловая скорость.
Модуль мгновенной скорости точечного тела, движущегося по окружности, равен произведению его угловой скорости на радиус окружности: .
Период и частота движения по окружности
Если точечное тело движется по окружности с постоянной угловой скоростью, то время, за которое тело делает один полный оборот, является фиксированной величиной, которая получила название период T.
Пусть точечное тело совершило 5 полных оборотов за t = 20 с. Понятно, что один оборот тело совершило за 4 секунды. Таким образом, период движения точечного тела по окружности можно найти по следующей формуле:
,
где T [с] — период;
Δt [с] — время, за которое тело совершило N оборотов;
N — количество оборотов за время Δt.
Период обращения Т — это время, за которое точечное тело, движущееся по окружности, совершает один оборот: .
Выразим из формулы величину Δt:
.
За один оборот N = 1 точечное тело поворачивается на угол .
Тогда формулу периода можно записать в следующем виде:
.
Для описания движения тела по окружности также используется физическая величина, показывающая количество полных оборотов в единицу времени — данная величина называется частотой (греческая буква «ню»):
,
где [с-1] — частота;
Δt [с] — время, за которое тело совершило N оборотов;
N — количество оборотов за время Δt.
Частота обращения — это количество полных оборотов, совершённых точечным телом при движении по окружности за время Δt: .
Единица измерения частоты в СИ — секунда в минус первой степени (с-1) или герц (Гц).
Глядя на формулы выше, становится очевидно, что период обращения и частота — взаимно обратные величины:
.
Тогда для частоты будут справедливы следующие соотношения:
.
Ускорение при равномерном движении по окружности
Численное значение линейной скорости тела остаётся постоянным с течением времени, однако, так как вектор скорости всегда направлен по касательной к траектории, направление данного вектора с течением времени изменяется
(рис. 6). Следовательно, тело, движущееся по окружности, имеет ускорение.
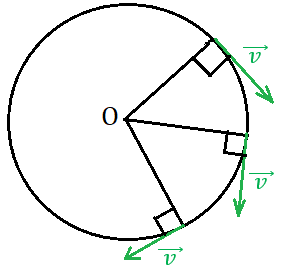 Рис. 6. Изменение вектора скорости с течением времени
Рис. 6. Изменение вектора скорости с течением времени
Пусть точечное тело за время Δt переместилось из точки А в точку В (рис. 7), при этом радиус-вектор, определяющий положение тела, повернулся на угол .
Путём геометрических построений несложно вычислить, что угол между вектором и вектором также равен . Следовательно, за время Δt вектор скорости повернулся на угол .
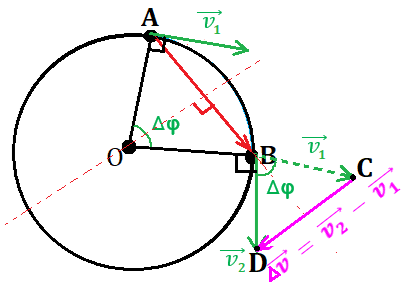 Рис. 7. При перемещении точечного тела из точки А в точку В радиус-вектор поворачивается на угол Δφ
Рис. 7. При перемещении точечного тела из точки А в точку В радиус-вектор поворачивается на угол Δφ
Вектор , равный изменению скорости , направлен под углом 90° к вектору перемещения . При уменьшении рассматриваемого промежутка времени Δt до достаточно малого значения точка В приблизится к точке А настолько, что вектор будет направлен к центру окружности О.
Так как ускорение по определению равно отношению , вектор мгновенного ускорения тела, движущегося по окружности, направлен к центру окружности.
Ускорение тела, равномерно движущегося по окружности, называется центростремительным и в любой точке траектории направлено к центру окружности.
Рассмотрим треугольники АОВ и ВСD (рис. 7). Оба треугольника являются равнобедренными, . Следовательно, треугольник АОВ подобен треугольнику ВСD. Тогда справедливо следующее равенство:
.
Если промежуток времени Δt является достаточно малым, то длина дуги практически равна длине хорды АВ. Тогда , а выражение выше можно записать в следующем виде:
.
Так как ускорение — это отношение изменения скорости ко времени, за которое произошло это изменение, формула центростремительного ускорения имеет следующий вид:
,
где [м/с2] — центростремительное ускорение тела;
[м/с] — мгновенная скорость;
R [м] — радиус окружности.
Модуль центростремительного ускорения тела равен отношению квадрата мгновенной скорости тела к радиусу окружности, по которой движется тело: .
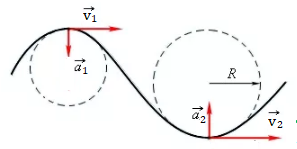 Рис. 8. Любое криволинейное движение можно рассматривать как движение по дугам окружностей разного радиуса
Рис. 8. Любое криволинейное движение можно рассматривать как движение по дугам окружностей разного радиуса
С учётом выражения выше модуль центростремительного ускорения можно рассчитывать по следующей формуле:
.
Полученные закономерности можно использовать для описания более сложных видов движения, так как любую криволинейную траекторию можно представить, как совокупность дуг окружностей разных радиусов (рис. 8).
Пример 1
Колесо радиусом 20 см делает 750 оборотов за 5 мин. Определите период обращения, угловую и линейную скорости, а также, центростремительное ускорение точки на ободе колеса.
Решение
1. Начнём с определения периода:
.
2. Угловая скорость связана с периодом следующим соотношением , тогда
.
3. Линейную скорость точки на ободе колеса можно связать с угловой скоростью, как было сделано выше.
.
4. Центростремительное ускорение точки можно рассчитать одной из двух формул: .
или
.
Ответ: ; ; ; .
Упражнение 1
1. Вентилятор делает 300 оборотов за 1 мин. Определите период обращения, угловую и линейную скорости, а также, центростремительное ускорение точки, расположенной на расстоянии 10 см от центра оси вращения вентилятора.
2. Закон равномерного движения точечного тела по окружности: . Определите начальный угол и угловую скорость данного тела.
Итоги
- Движение по окружности — это такое движение точечного тела, при котором его траектория в выбранной системе отсчёта имеет форму окружности.
- Угловая скорость — это величина, равная отношению угла поворота радиус-вектора точечного тела, движущегося по окружности, за время Δt к этому промежутку времени: .
- Закон равномерного движения точечного тела по окружности: .
- Период обращения Т — это время, за которое точечное тело, движущееся по окружности, совершает один оборот: .
- Частота обращения — это количество полных оборотов, совершённых точечным тело при движении по окружности за время : .
- Вектор мгновенной скорости тела, движущегося по окружности, направлен по касательной к окружности в каждой точке траектории.
- Модуль мгновенной скорости точечного тела, движущегося по окружности, равен произведению его угловой скорости на радиус окружности: .
- Ускорение тела, равномерно движущегося по окружности, называется центростремительным и в любой точке траектории направлено к центру окружности.
- Модуль центростремительного ускорения тела равен отношению квадрата мгновенной скорости тела к радиусу окружности, по которой движется тело: .
Контрольные вопросы
1. Дайте определение угловой скорости. По каким формулам её можно рассчитать?
2. В чём состоит физический смысл центростремительного ускорения?
3. По какой формуле можно рассчитать центростремительное ускорение тела?
Упражнение 1
1. ; ; ;
2. ,